
自动导引车AGV通用技术条件规定了自动导引车的产品分类、技术要求、试验方法、检验规则及标志、包装、运输、贮存。本文件适用于仓储、产线、运输、制造业等领域的自动导引车的设计、制造、检验等。

自动导引车AGV通用技术条件
规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。

自动导引车AGV通用技术条件
GB/T 191 包装储运图示标志
GB/T 2423.55 电工电子产品环境试验 第2部分:试验方法 试验 Eh:锤击试验
GB/T 4208 外壳防护等级(IP 代码)
GB/T 5226.1—2019 机械电气安全 机械电气设备 第1部分:通用技术条件
GB/T 10827.1—2014 工业车辆 安全要求和验证
第1部分:自行式工业车辆(除无人驾驶车辆、伸缩臂式叉车和载运车)
GB/T 15706 机械安全 设计通则 风险评估与风险减小
GB/T16855.1 机械安全 控制系统安全相关部件 第1部分:设计通则
GB/T 17626.2 电磁兼容 试验和测量技术 静电放电抗扰度试验
GB/T 17626.3 电磁兼容 试验和测量技术 射频电磁场辐射抗扰度试验
GB/T 17626.4 电磁兼容 试验和测量技术 电快速瞬变脉冲群抗扰度试验
GB/T 17626.5 电磁兼容 试验和测量技术 浪涌(冲击)抗扰度试验
GB/T 17626.6 电磁兼容 试验和测量技术 射频场感应的传导骚扰抗扰度
GB/T 17626.8 电磁兼容 试验和测量技术 工频磁场抗扰度试验
GB/T 17626.11 电磁兼容 试验和测量技术
电压暂降、短时中断和电压变化的抗扰度试验
GB/T 17799.2 电磁兼容 通用标准 工业环境中的抗扰度试验
GB/T 17799.4 电磁兼容 通用标准 工业环境中的发射
GB/T 18849 机动工业车辆 制动器性能和零件强度
GB/T 20138 电器设备外壳对外界机械碰撞的防护等级(IK 代码)
GB/T 26154—2010 装配机器人 通用技术条件
GB/T 27544—2011 工业车辆 电气要求
GB/T 27693 工业车辆安全 噪声辐射的测量方法
自动导引车AGV通用技术条件
术语和定义
GB/T 5226.1—2019界定的以及下列术语和定义适用于本文件。
GB/T 20721—2022
3.1自动导引车 automatic guided vehicle;AGV
具备物料运输或操作能力,以轮式移动为特征,基于环境标记物或外部引导信号,沿预设路线运动的自主移动设备。
自动导引车AGV通用技术条件
3.2运行模式 running mode
单一 自动导引车执行运动指令的方式。
注:包括手动方式、自动方式、离线自动方式等。
3.3导航方式 navigation mode
自动导引车在运行区域中实现自动行驶的方式。
3.4装载方式 loading mode
自动导引车为运输货物的需求所提供的承载及货物交换方式。
3.5额定负载 rated load
自动导引车在正常工况下,能确保标称性能参数,所允许的最大载荷。
3.6额定速度 rated speed
自动导引车在额定负载下能长期稳定运行的最大标称速度。
产品分类
4.1 按导航方式分类
按照感知信号,包括:
—电磁导航;
— 磁导航;
— 光学导航;
—无线电导航;
—激光导航;
— 惯性导航;
— 视觉导航;
—混合导航;
—其他导航。
4.2 按驱动方式分类
按照轮式移动方式分类,包括:
— 单轮驱动;
— 双轮驱动;
—多轮驱动。
4.3 按驱动结构分类
按照驱动结构分类,包括:
— 差速结构;
GB/T 20721—2022
—舵轮结构;
— 麦克纳姆轮结构;履带结构;
— 车桥结构。
4.4 按装载方式分类
按照装载方式分类,包括:
— 举 升 式 ;
— 牵 引 式 ;
背负式:
– 移 载 式 ;
– 叉取式;——其他。
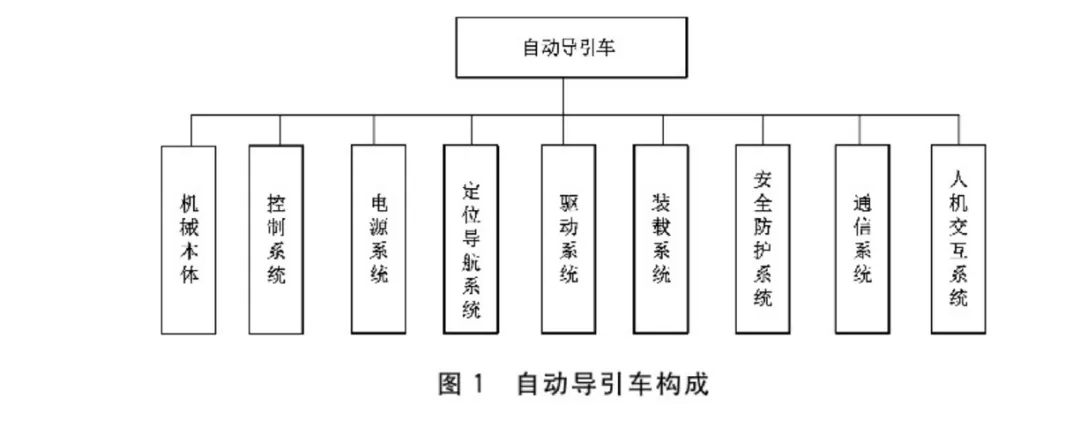
系统构成
自动导引车由机械本体、控制系统、电源系统、定位导航系统、驱动系统、装载系统、安全防护系统、
通信系统和人机交互系统构成,如图1所示。
自动导引车AGV通用技术条件
注:机械本体是指承载结构。
在变种变量生产中,需要一种能够及时搬运必要物品的方法
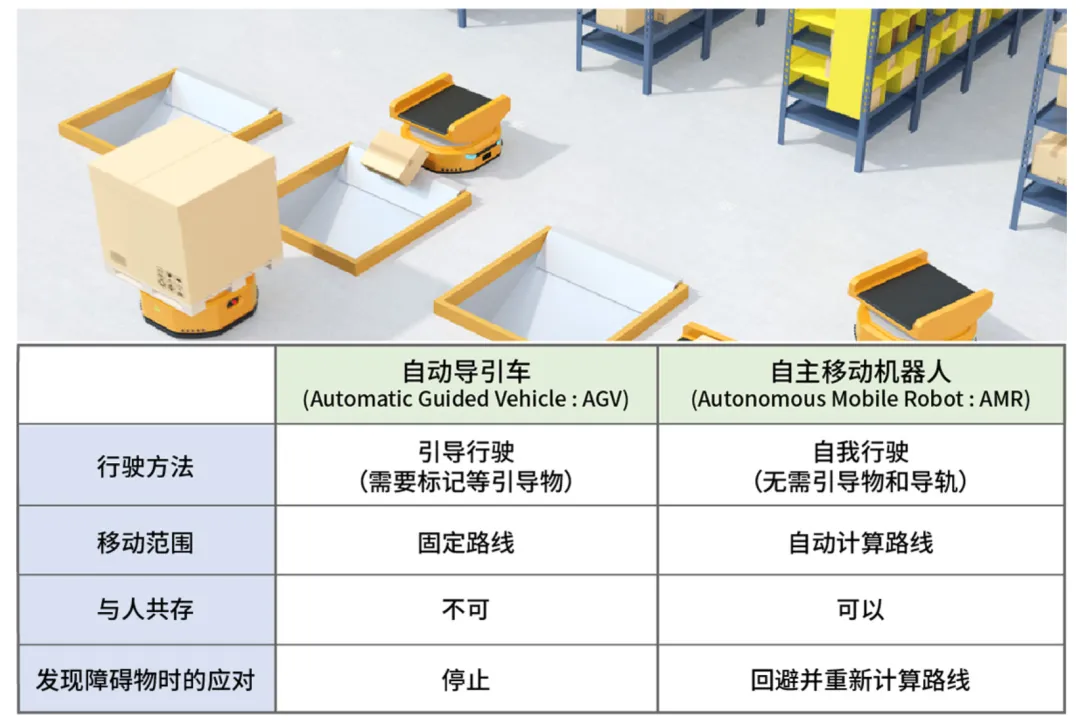
但是,在进行变种变量生产时,有时即使使用AGV也无法很好地应对。这是因为适用于变种变量生产的单元式生产线与AGV搬运的兼容性不够好。
在单元式生产线上,一名作业人员承担多道工序。因此,可以相对减少在制品的搬运频度。但是,并非所有工序都可以由一个人承担。虽然很少,但也有搬出和搬入两项作业。而且,在变更生产品目时,需要提前供给生产下一款产品所需的零部件和材料。
自动导引车AGV通用技术条件
一般来说,在单元式生产线中,多个作业台排成一列,并分别配置作业人员进行生产。根据每个作业台的进度,及时进行在制品的搬出搬入以及零部件补充。因此,需要一种可以像出租车那样自由设定搬入搬出场所和时间的搬运方法,而不是像铁路或固定路线公共汽车那样具有固定路线和运行时间表的AGV。此外,在单元式生产线中,由于自动导引车将在有作业人员的地方移动,因此需要实现能够隔离搬运路线的高安全性,这是AGV所不需要的。
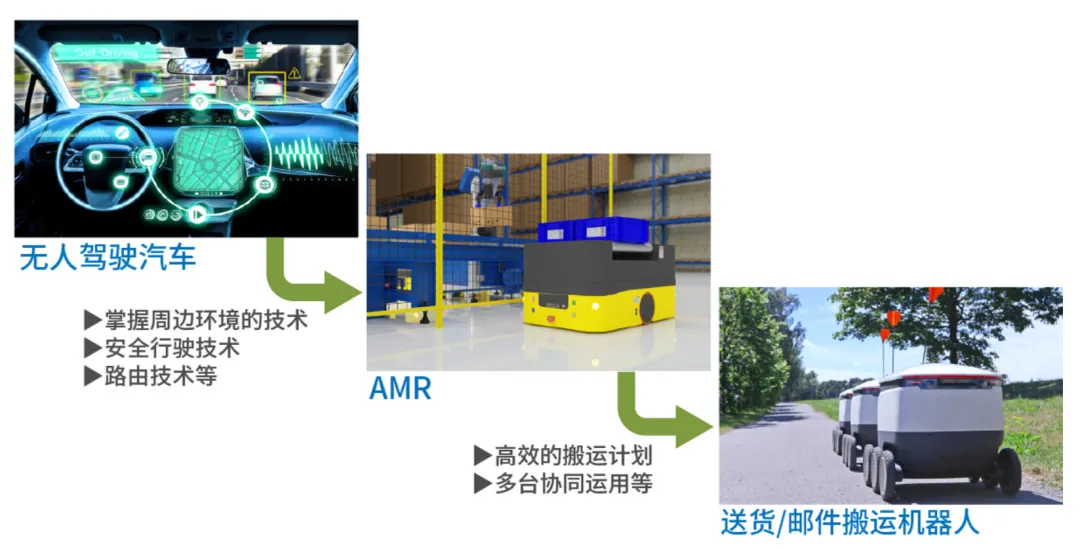
作为解决这些问题的搬运方法,一边根据有人的地方的状况改变移动路线一边搬运物品的AMR已经被投入使用。AMR通过传感器自动识别搬运路线中成为障碍物的装置等的位置,并提前以地图的形式存储,在搬运过程中,一边通过传感器检测工厂内人员的位置和行动一边安全地移动。尽管行驶环境和速度不同,但可以说它与汽车行业正在开发的无人驾驶汽车具有相同的功能(图2)。预计AMR技术不仅会用于工厂,还会用于送货和邮件的自动投递。
自动导引车AGV通用技术条件
预测稍后的作业进度,将所需的零部件进行智能搬运
在AGV和AMR等搬运方法中,如何有效且高效地运用也变得非常重要。
为了尽量减少在制品、组装前的零部件及材料等的库存,理想的运用是“Just in Time”,这样可以根据需要及时搬运。此外,像AMR这样根据情况改变搬运路线时,在最短的时间内找出能够搬入和搬出的移动路线也很重要。但是,随着物联网和人工智能等信息处理技术的发展,现在已经可以在掌握整个工厂的状况的同时找到理想的运用方法。
首先,物联网使准确掌握单元式生产线各作业台上的作业进度状况、零部件和材料的库存状况成为可能。迄今为止,状况都是通过被称为“看板”的传票来传达的。通过将其数字化,可以根据实时掌握的工厂情况发现稍后会发生的作业停滞,并得出应对措施。
此外,迄今为止,在进行变种变量生产的工厂中,通过人工根据生产品目将需要的零部件和材料从仓库的货架上挑出,并装入搬运车进行运送。现在,已经可以一边参照数字化看板信息,一边由搬运机器人挑选摆放所需零部件和材料的货架后移动到有人的地方,并在最短的时间内运送它们。
